あそびっと
2016年11月18日
[DCC]
2列車自動運転
Automatic controlled 2 Trains by Desktop Station System
S88センサーとDesktopStationのイベント制御を使って、2列車の自動運転をしてみる.
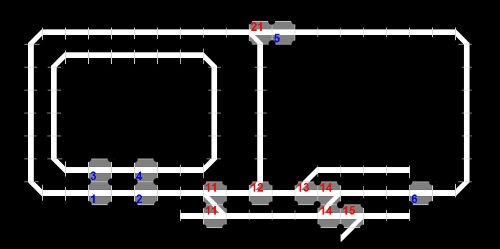
上図のような線路構成で、青数字はセンサーアドレス、赤数字はポイントのDCCアドレスである.
HOn3(10.5mm)の独立したエンドレス線路と、ポイント21と12で切替るHO(16.5mm)の外周/内周線路の両方を、WindowsのDesktopStation(=DSアプリ)でコントロールする.
DSアプリはVer0.95e7を使用した.
HOn3を含めて、実際には3列車が走行することになる.
6番センサーの左にSTATION-1駅があり、3,4及び1,2センサーの間にSTATION-2駅がある.
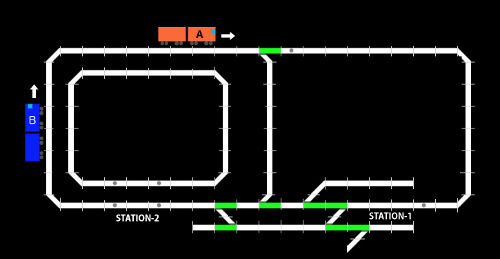
初期のポイントは上図の状態で、A,Bの列車がスタートする.
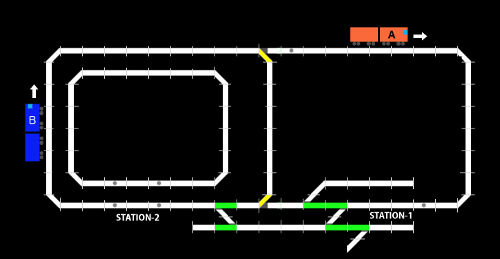
Aロコが5番センサーを通過すると、21,12のポイントが内側に切り替わる.
Bロコは内側のエンドレスに入る.
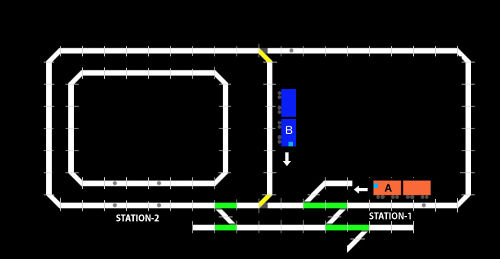
Aロコは6番センサーを通過すると、STATION-1で停車する.
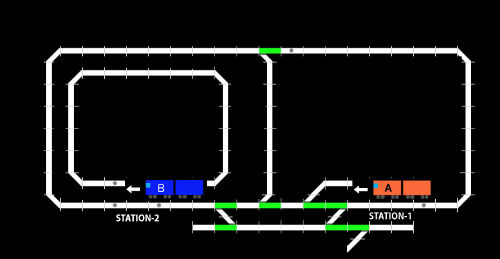
Bロコは2番センサーを通過すると、STATION-2で停車する.
Aロコは、BロコがSTATION-2を発車するまで、STATION-1で待つ.
7秒後にBロコが発車すると、Aロコもポイント12を開いて発車する.
Bロコが1番センサーを通過すると、21のポイントを外側に切り替える.
これでA,Bロコの前後が入れ替わり、このあと同様の動作を繰り返す.
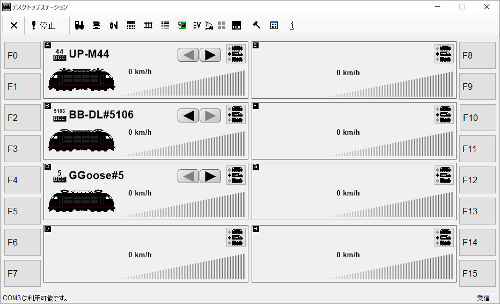
実際のA,Bロコは、Slot-AとSlot-Bで指定する.
Slot-CはHOn3を走るロコで、これは単純に3番センサーで停止/発信を繰り返す.
○
「2列車自動運転のイベントファイル」サンプル
テキストファイルになっているので、「.txt」を「.xml」に変更し、DSアプリのEVファイルとして読み込む.
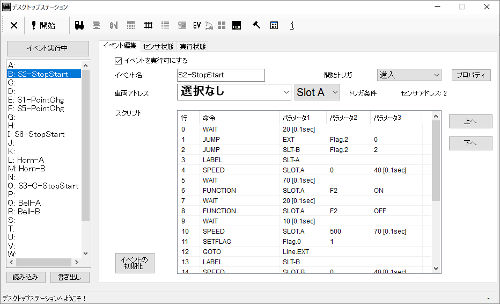
上図が「イベント編集」画面
自動運転のイベントは、1,2,5,6番センサー毎に記述する.
3番センサーはHOn3用である.
現状の光センサーでは、通過する車両の種類を区別できない.
このため、複数の車両を同時に走らせる場合、初期状態からの走行位置の変化を予想する必要がある.
このためにフラグを使って状態を管理している.
・フラグ 0 = AorB列車がSTATION-2を発車すると 0 →1 になる
・フラグ 2 = 2番センサーで、0:なにもしない、1:Slot-Aを制御、2:Slot-Bを制御
・フラグ 6 = 6番センサーで、0:なにもしない、1:Slot-Aを制御、2:Slot-Bを制御
・フラグ 12 = 12番ポイントで、0:直進(GREEN)、1:分岐側(RED)
・フラグ 21 = 21番ポイントで、0:直進(GREEN)、1:分岐側(RED)
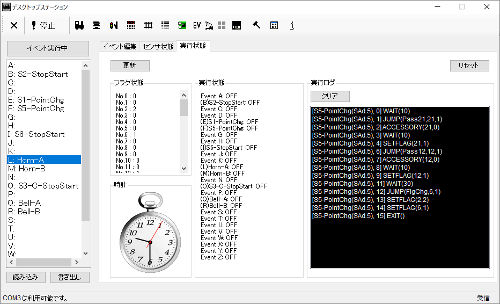
上図が「実行状態」の画面.
ここでフラグとイベントの動作状態がわかる.
ロコを途中で止めたりすると、フラグが正しく更新されずに、その後の全体の動作がおかしくなる場合がある.
その場合はめんどうだが、ロコの位置を初期状態に戻して、再スタートするほうが早い.
DesktopStation社社長のブログをみると、RFIDのチップを車両に乗せて、センサーが個々のロコを識別するという、最新技術の導入を目論んでいるようだ.
それができれば、かなり高度な自動運転が可能になる.
だだし、イベント作りはずんずん難しくなるだろう.(面白いけど)
- - - - - - - - - - - - - - - - -
A列車の車窓映像
- - - - - - - - - - - - - - - - -