あそ・びっと工房
2021年5月27日
[On3/30/Sn3-MOD]
腕木式信号機を作る
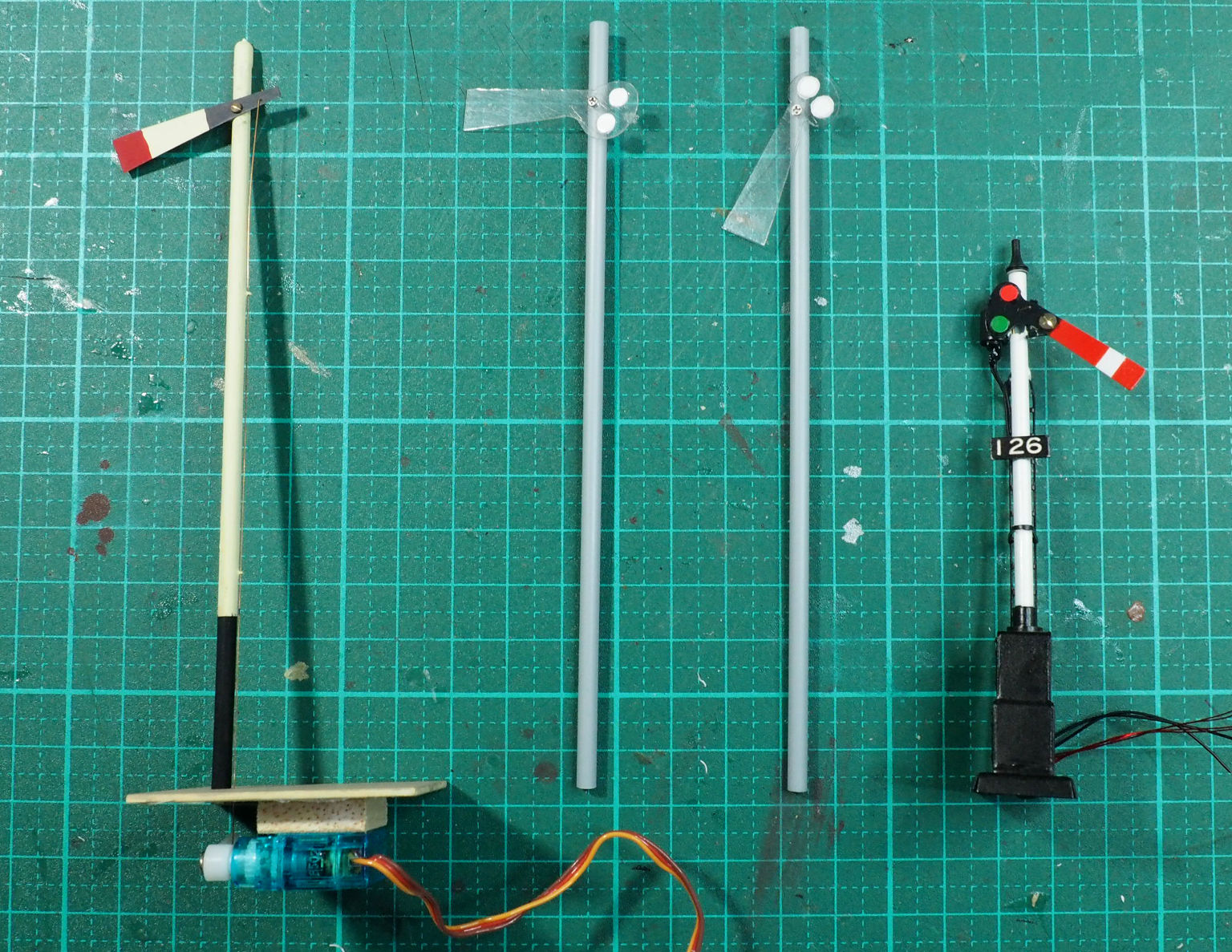
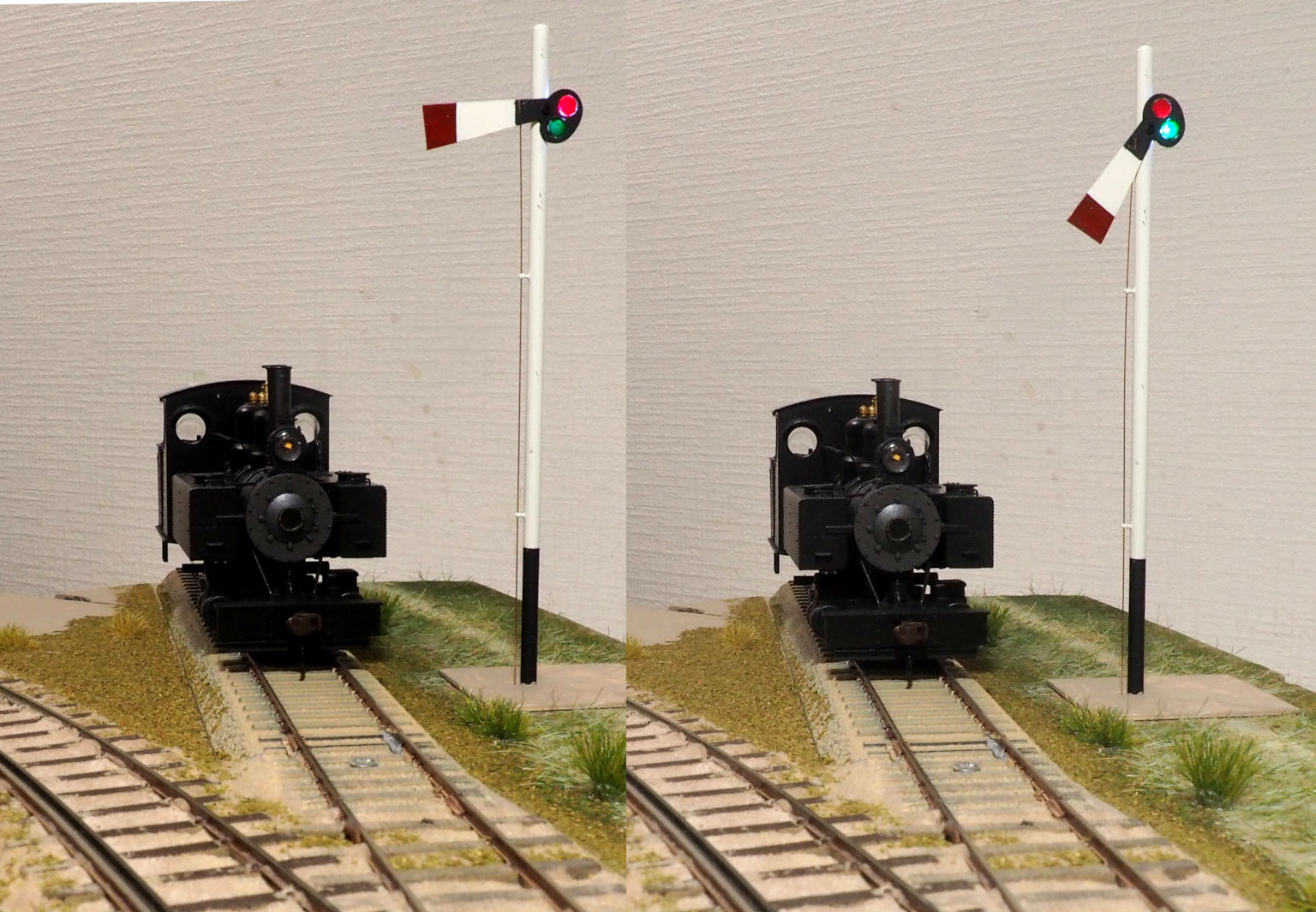
左端は
4年前に作った信号機.
これを元に、ライト付きの腕木式信号機を2本作る.
右端はHO用の市販品.
今回のスケールはOn30だが、
HO用をそのまま2倍にすると、大きすぎる.
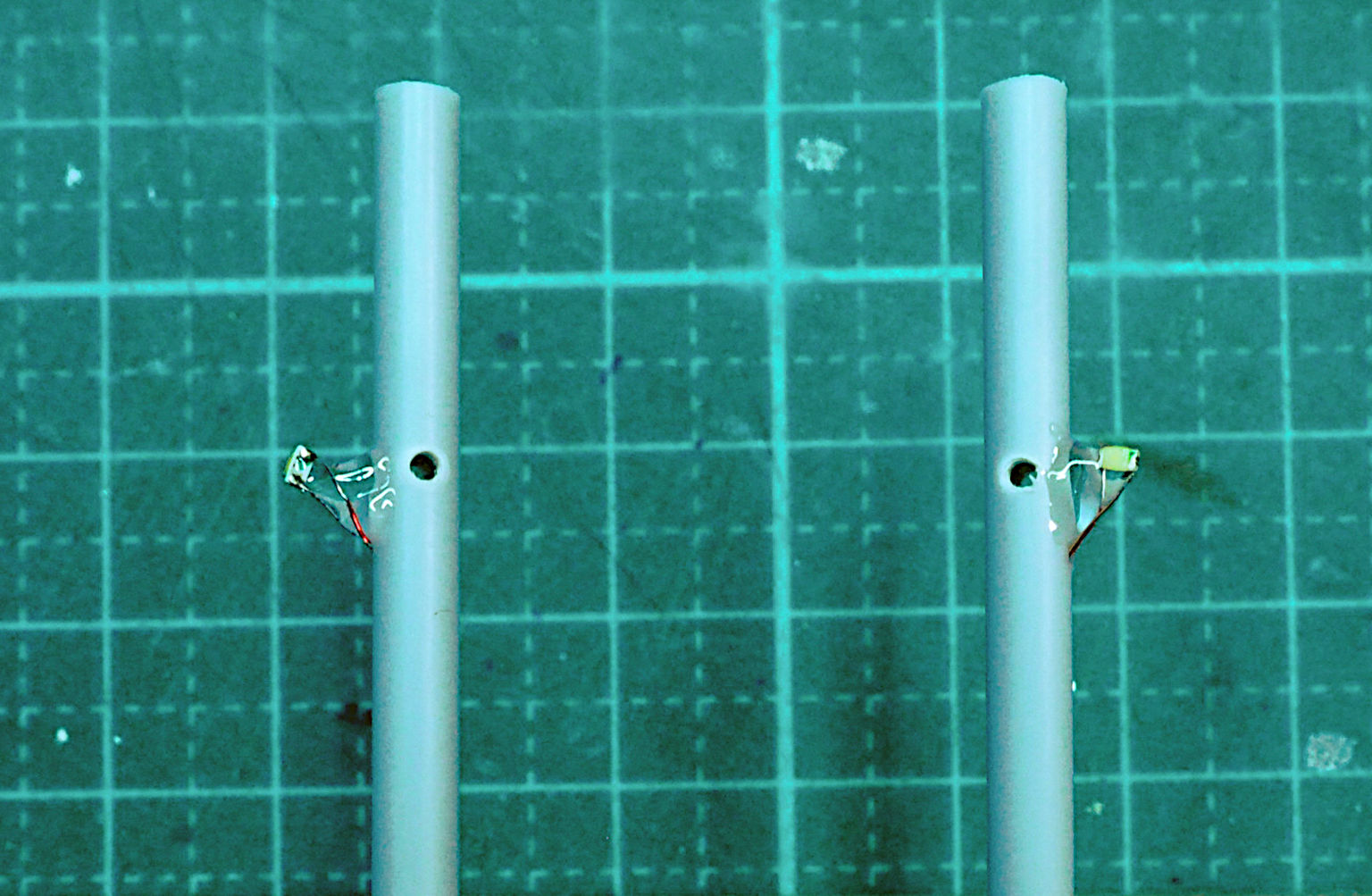
柱は3.5mm径のプラスチックパイプ.
極小LEDをUVレジンで固定する.
リード線はパイプ内を通す.
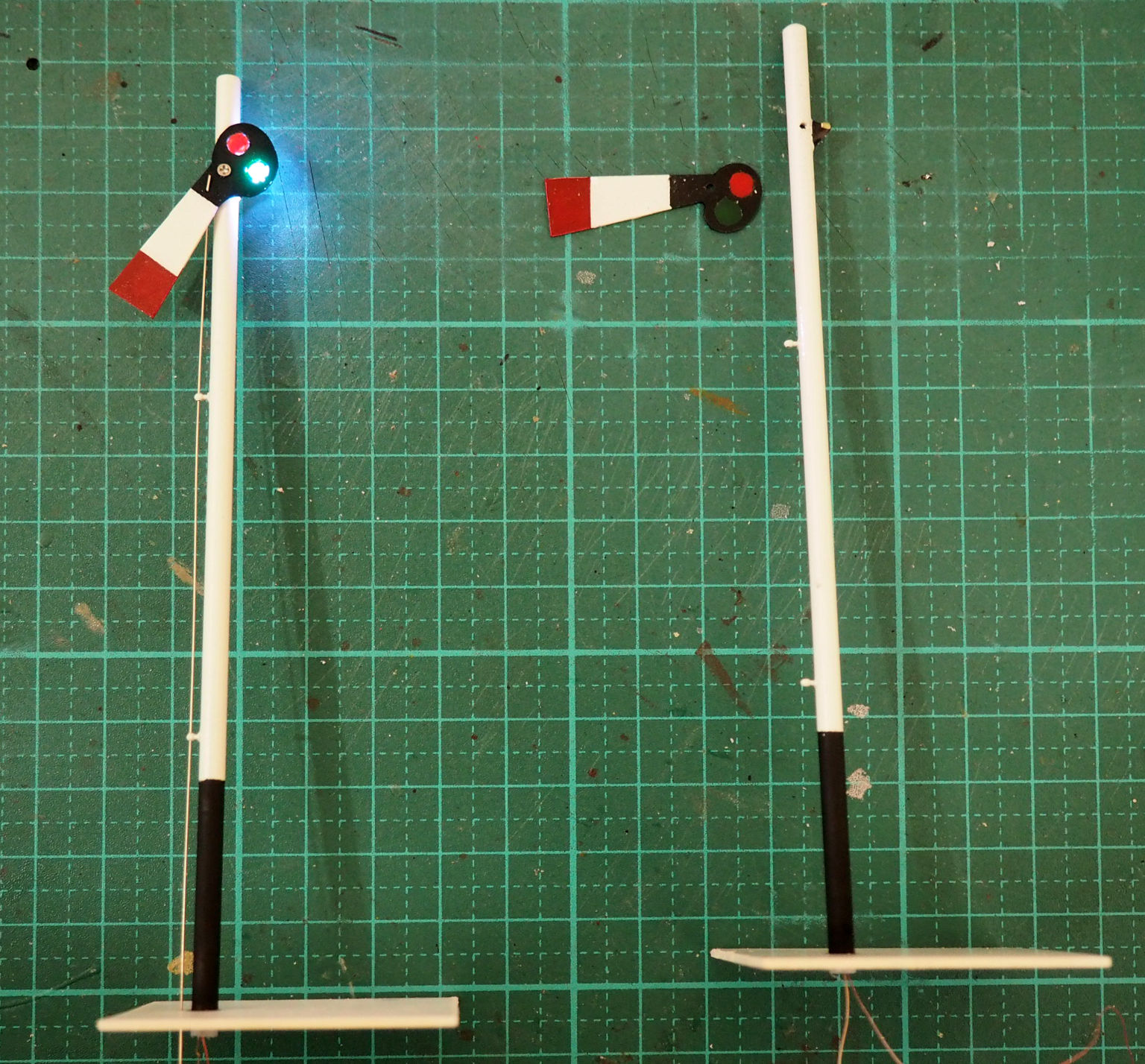
透明プラ板を塗装した信号腕.
赤青のレンズ部分は塗料を塗っただけ.
柱にSLの配管用ピンを埋め込んで、
ここに0.2mmのリン青銅線を通す.

台枠に開けた穴

床下の三角プラ板から、
リン青銅線を介して、腕木を上下させる.
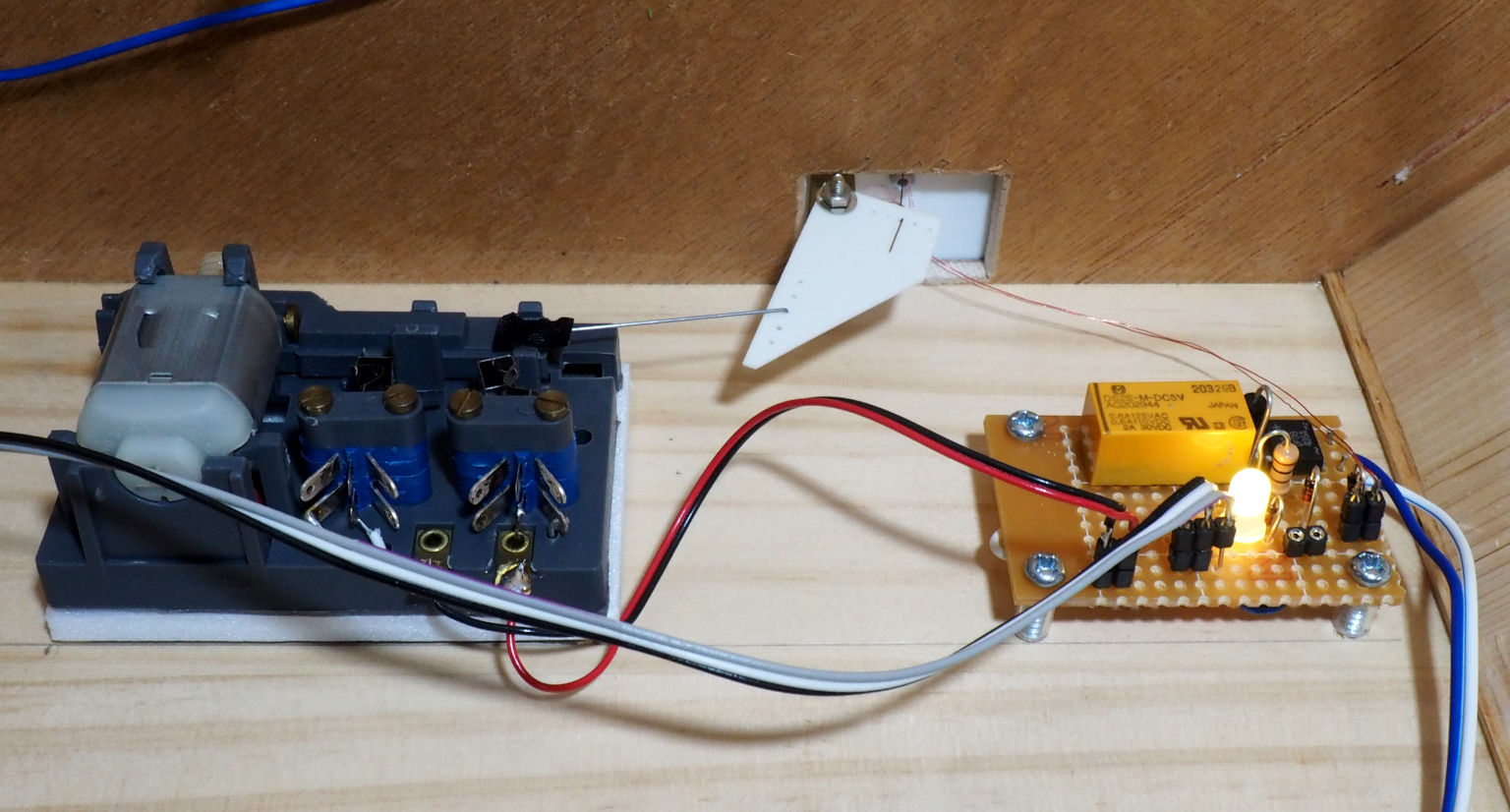
Lemacoのサーボモーターで三角クランクを動かす.
このサーボは動作範囲を変更できないので、
クランクの穴の位置で、腕木の動作位置を調整する.
サーボの動作音が大きいので、
スチロール板をはさんで両面テープで固定している.
こんな感じで動く.

ポイントは
Tortoiseで駆動している.
Tortoiseの予備接点でLemacoサーボを動作させるために、
インターフェース(IF)が必要になる.
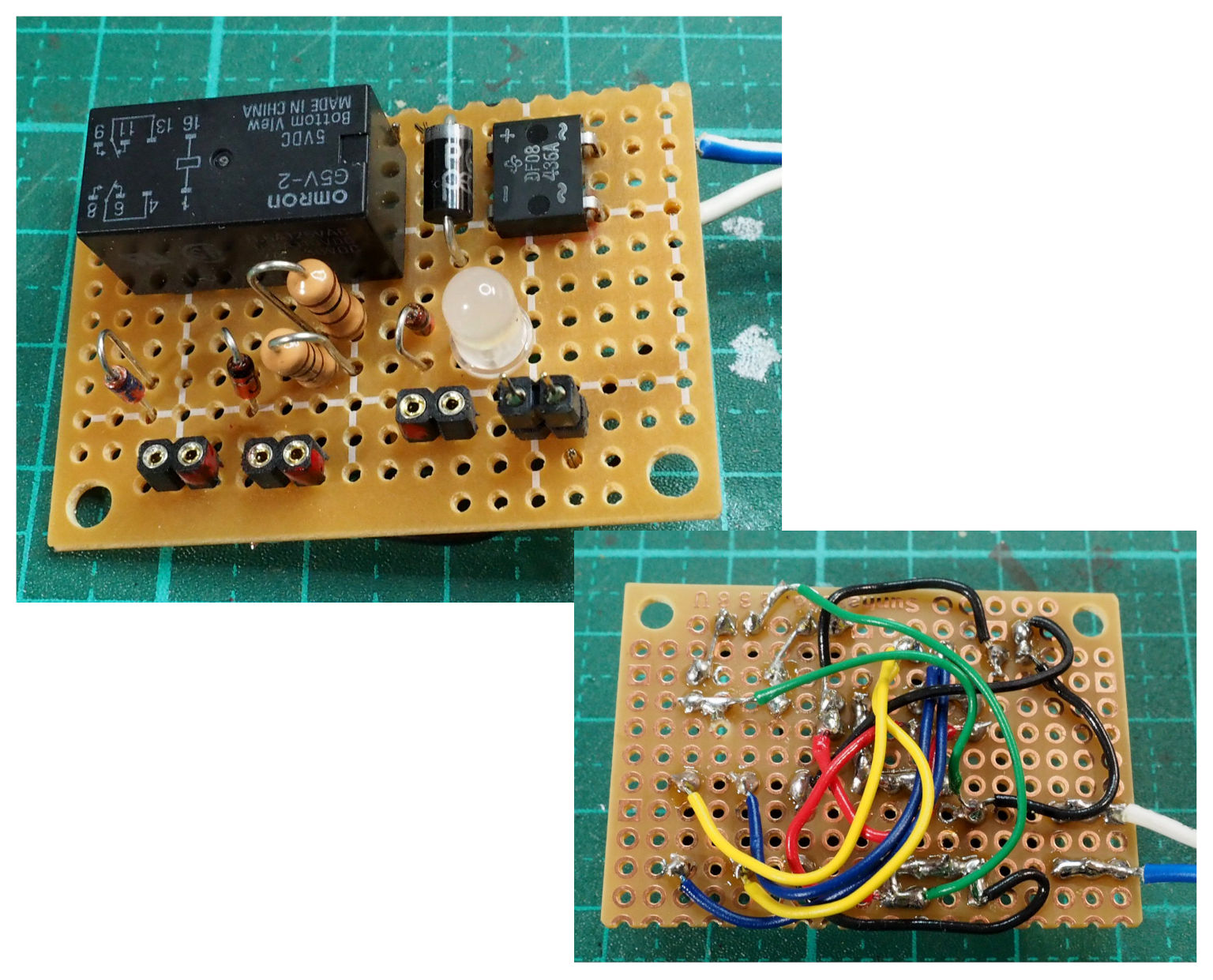
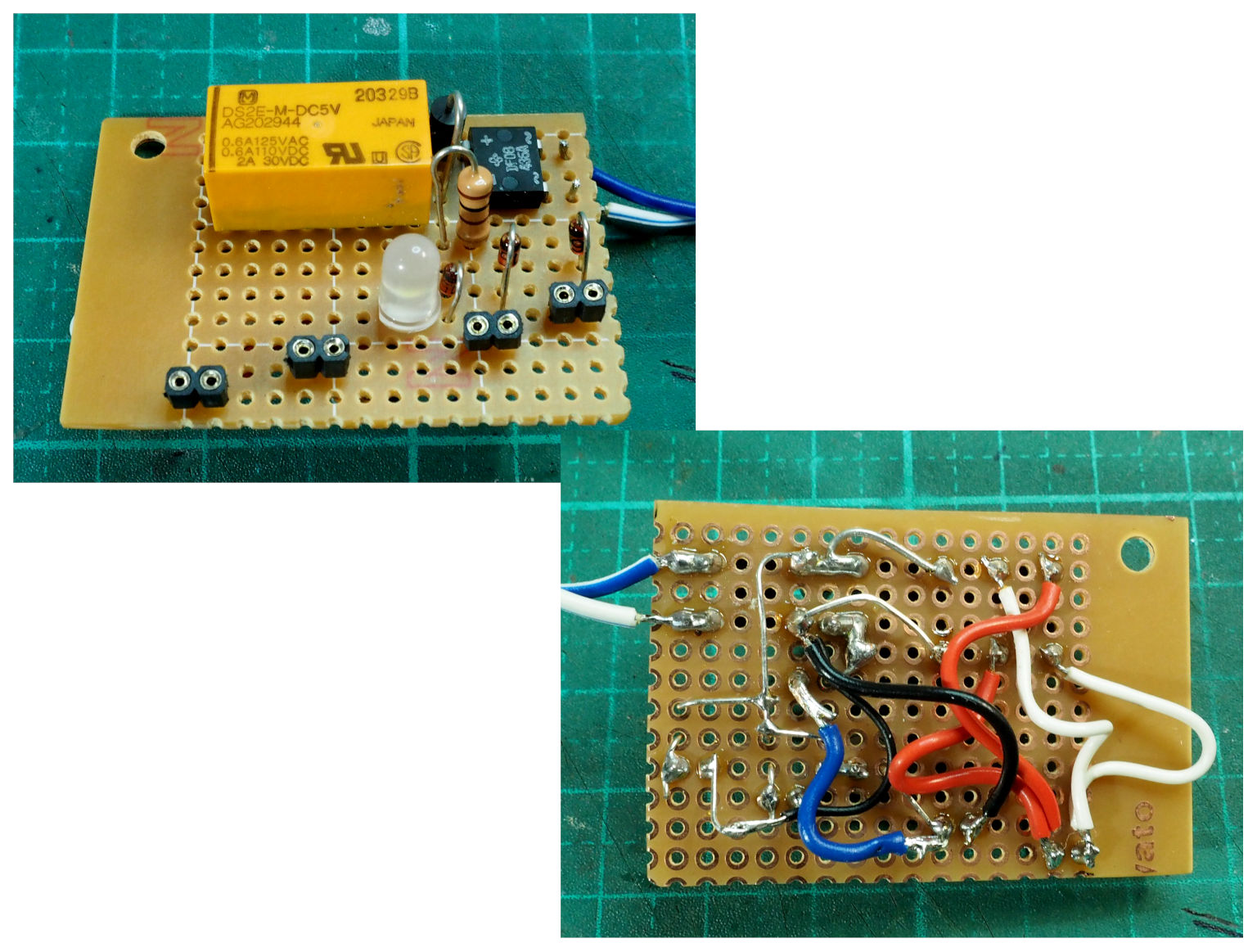
LemacoサーボのIFは、二つ作った.
2号機
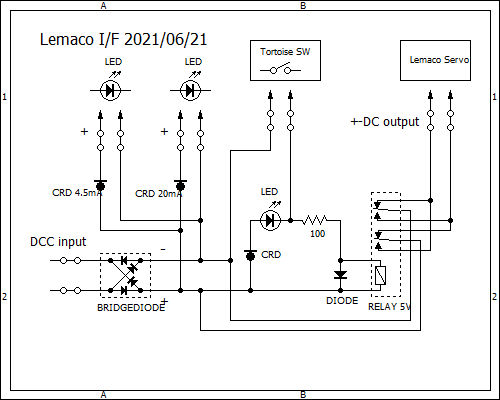
Lemacoサーボモーター用IFの回路図
DCC入力をブリッジで整流し、
Tortoiseの接点でリレーを駆動して、
Lemaco用12Vの「+-」を切り替える.
腕木のライト用には、通常4.5mAのLED出力を使う.
LEDの20mA出力は予備.
LemacoのサーボはTortoiseと同じく、直流12V程度の+-切替で動作するのだが、Wabbitデコーダーでも、DS社のポイントデコーダーでも動かなかった.
サーボの動作電流が大きすぎるらしい.
Tortoiseには予備接点が2回路あるので、これを使えばリレーは不要だが、あいにく1回路はポイントのクロッシングの給電に使っている.
そのため今回、専用のリレーIFを作った.
このIFは、Tortoiseの動作に従って動くので、DCCコマンドではなく、Wabbitの手動スイッチでポイントを切り替えた場合にも、信号機が連動する.